Simulation NVIDIA NuRec Isaac Sim PhysicalAI Dinov3 ros 2 NuRec: Bridging the Visual Fidelity Gap in Simulation We tested NVIDIA’s NuRec, revealing practical trade-offs for 3D robotics simulation.
simulation nvidia isaac sim ar4 ros 2 moveit R&D AR4 Robot vs the Chessboard: A Simulation in Isaac Sim Simulating the AR4 robot playing chess in Isaac Sim with ROS 2.
simulation nvidia isaac sim ar4 ros 2 moveit R&D Taking the AR4 Further: From Gazebo to Isaac Sim We're excited to share the next step in our journey extending the AR4 simulation into Isaac Sim and MuJoCo.
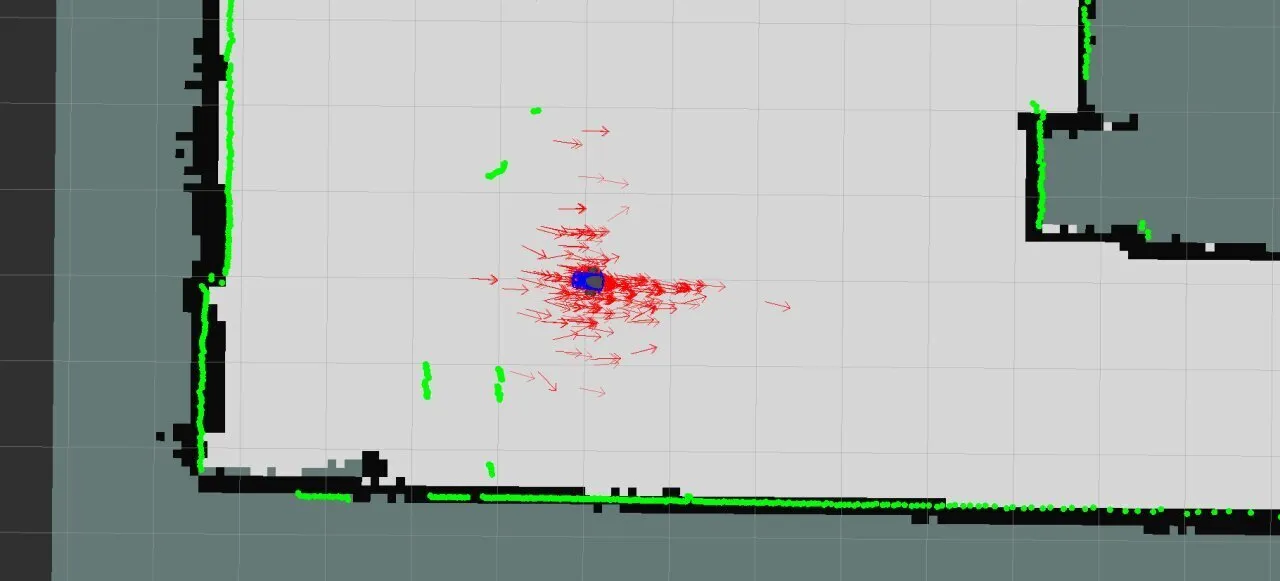
beluga ros 2 nav2 R&D Upgrade your robot's navigation stack with Beluga AMCL Beluga AMCL is a drop-in replacement for Nav2 AMCL and a gateway to more advanced localization solutions for robotics.
beluga ros 2 R&D A Beluga in Monte Carlo Beluga is an open source implementation of particle filters written in C++17 that works as a drop-in replacement for AMCL ROS.
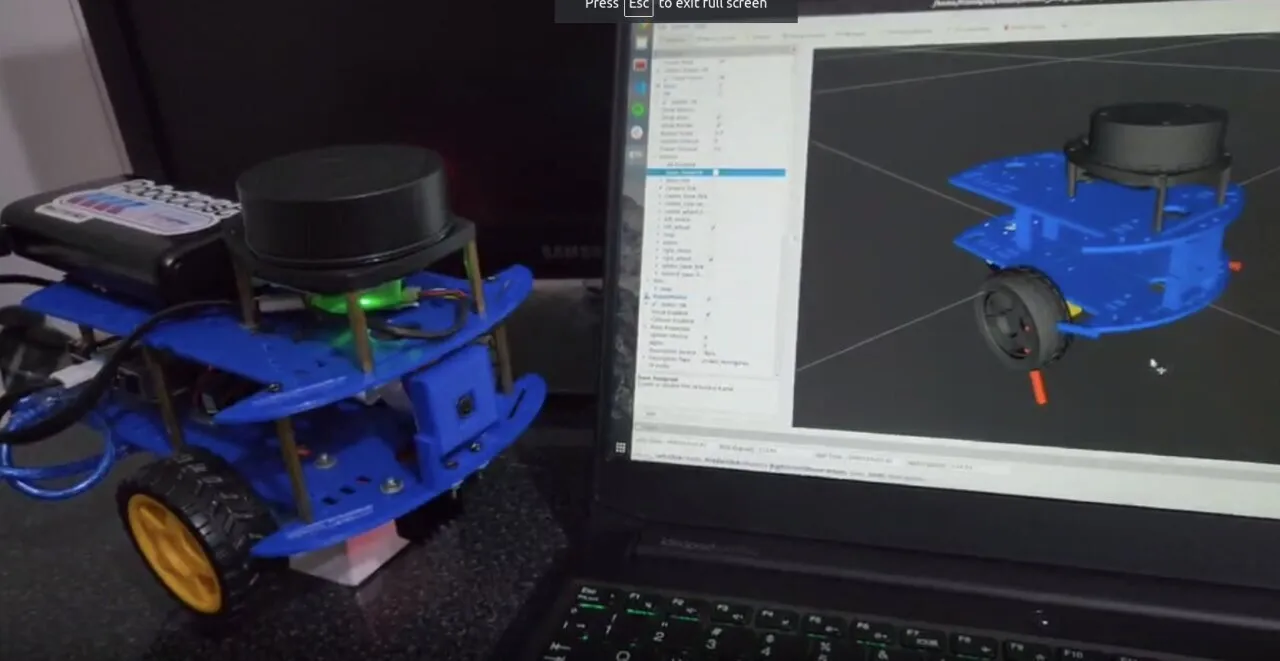
andino ros 2 R&D Andino: Empowering Education with an Open-Source Educational Robot We proudly introduce Andino, an innovative open-source differential drive robot designed specifically for educational purposes