amcl nav2 benchmarking lambkin R&D A Tale of Two Formulas: Benchmarking the Nav2 AMCL Likelihood Field Sensor Model A story of unexpected math, retro-engineering code that just-works, and benchmarking.
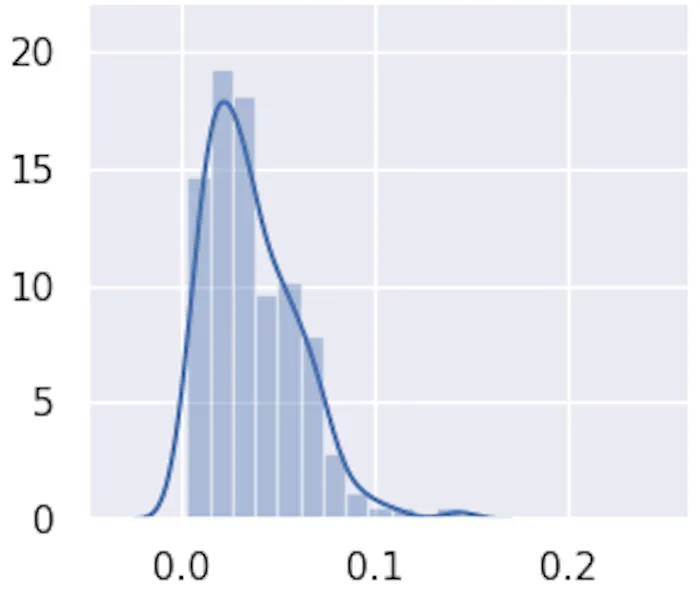
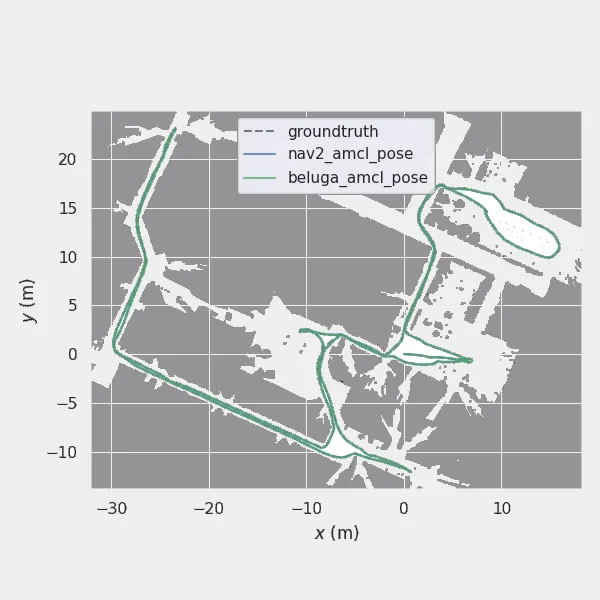
beluga amcl benchmarking R&D Big shoes to fill: Validating the performance of Beluga AMCL Beluga AMCL is a modern reimplementation of the localization package in ROS using the Beluga library, but does it work? We demonstrate it is a viable alternative to Nav2 AMCL by testing it against a large number of real-robot public datasets.